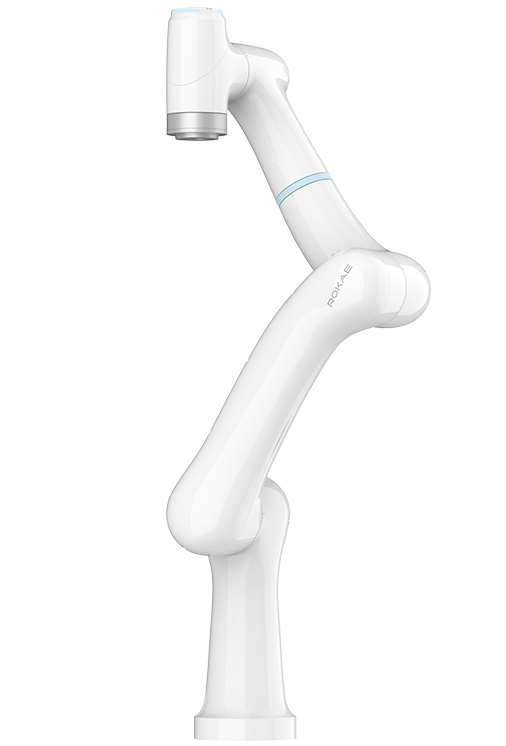
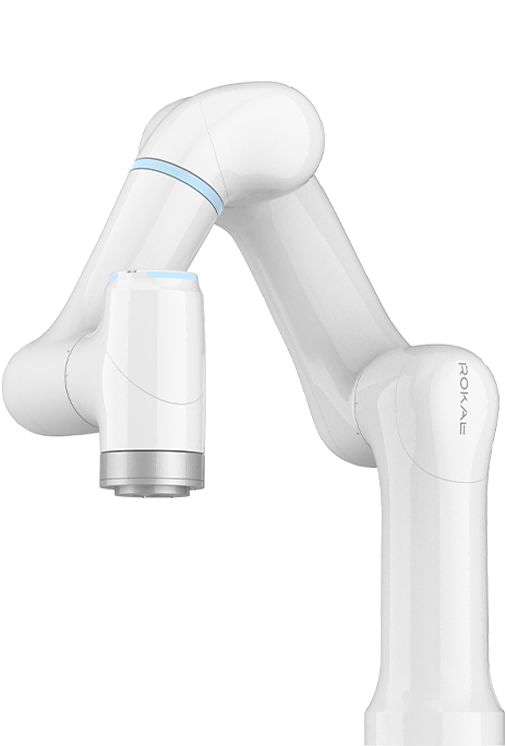
SR-C Серия Адаптивные коллаборативные роботы

xMate SR-C - это обновленная версия гибкого сотрудничающего робота серии xMate SR. В этой модели контроллер был вынесен из основания и размещен в отдельном шкафу, что позволяет эффективно управлять в ограниченных пространствах. В то же время xMate SR-C полностью обновилась, увеличив грузоподъемность до 5 кг.
SR-C Серия
Подать заявку на прототип