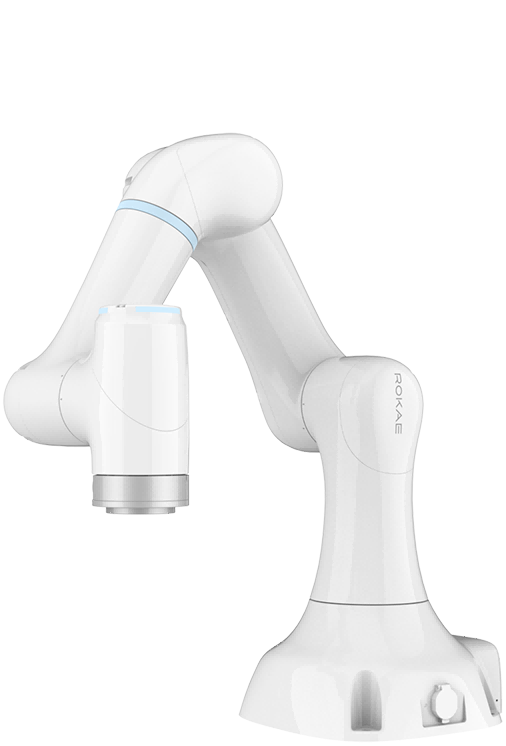
SR Серия Адаптивные коллаборативные роботы

Коллаборативные роботы xMate серии SR имеют облегченную конструкцию с множеством технологий защиты, отличаются высокой точностью, простотой эксплуатации, при этом средний срок окупаемости роботов составляет от полугода. Это идеальный выбор для модернизации и интеллектуализации рабочего процесса.
SR Серия
Подать заявку на прототип